Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Worked with researchers at the Stanford Hopkins Marine Station to analyze novel white shark Pop-up Satellite Tag (PSAT) data tracking and performed in-situ sampling of oceanography in the region. Our results suggest that the core of anticyclonic eddies, peripheries of cyclonic eddies, and seamounts are structuring vibrant mesopelagic communities in the area, attracting white sharks in a similar way to the well-known White Shark Cafe. 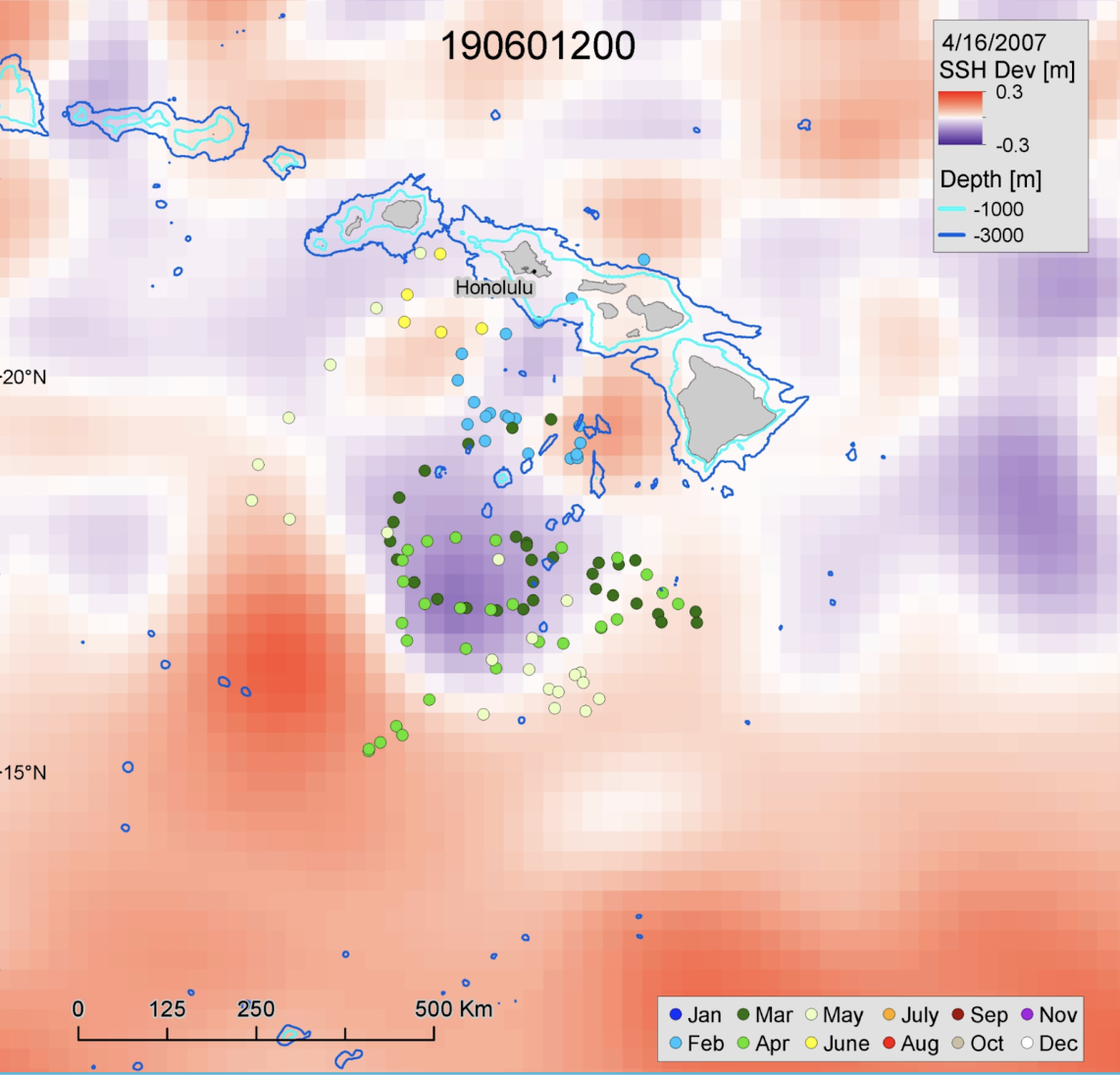
Developed new methods for oordinating multi-robot aerial surveys for studying Adelie Penguins in Cape Crozier, Antarctica. GRIT (Greedy Repair Initializes Tabu search) outperforms path repair for nominal paths planned with both a traditional lawnmower-style planner and a more sophisticated integer program based planner, achieving adequate re-plans 10-50 times faster than two benchmark planners, making it ideal for online path repair in mid-flight. See the paper. 
Co-taught and designed an introductory AI Robotics course for undergraduates at Stanford. In 2023, the course was elevated to CS 123 and I served as head TA for Professor Karen Liu. 
Initiated collaboration between Stanford Student Robotics and Universidad de Costa Rica to automate analysis of drone imagery of sharks, rays, and turtles. Led a team of Stanford Students on a field mission to survey Santa Elena Bay, Costa Rica to survey endangered species (Pacific Nurse Sharks, Olive Ridley Turtles) and habitat (mangroves, reefs). We have since released several papers and are developing novel camera tags to study endangered marine animals from underwater (planned deployment summer 2025). 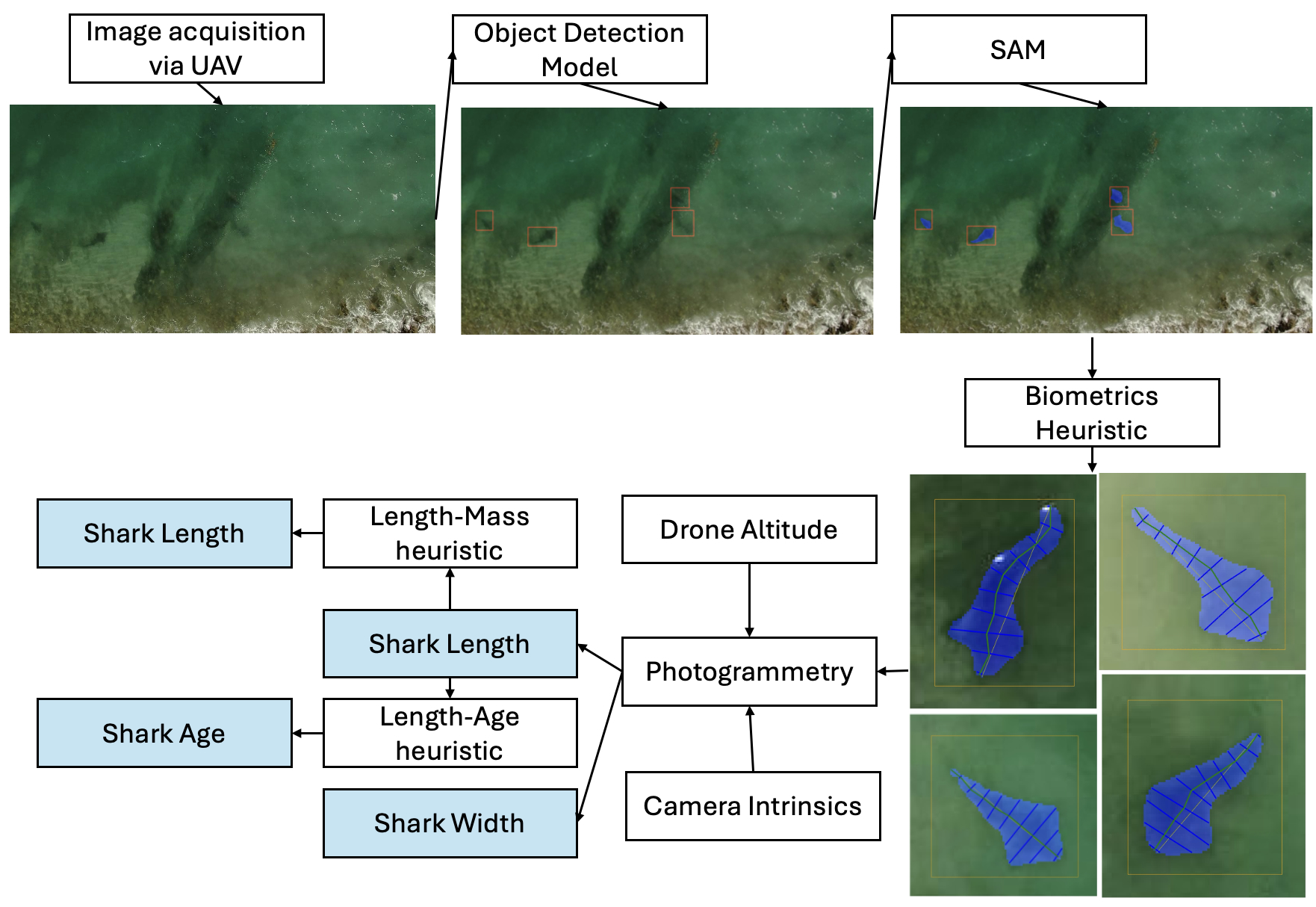
 At Hands-On Robotics we are collaborating with the Stanford Children’s Hospital to explore how quadrupeds can improve peri-operative and inpatient pediatric experience. Our work has been featured in the Stanford Report, ABC News, and more.
At Hands-On Robotics we are collaborating with the Stanford Children’s Hospital to explore how quadrupeds can improve peri-operative and inpatient pediatric experience. Our work has been featured in the Stanford Report, ABC News, and more.
Published in Integrative and Comparative Biology, 2021
Published in IROS 2023: 1st Workshop on Multi-Agent Dynamic Games, 2023
Published in Robotics and Automation Letters, IROS 2024, 2024
Published in RSS 2024, 2024
Published in ECCV Computer Vision for Ecology 2024, 2024
Published in Methods in Ecology and Evolution, 2025
Published in ICRA 2025, 2025
Published in CoRL 2025, 2025
Published:
Worked with Dr. Chris Lowe and the CSULB Shark Lab to tag and track Leopard Shark in Big Fisherman’s Cove.
Published:
I spent 3 weeks in Central Arizona collecting Clark’s Spiny Lizards (Sceloporus clarki) with Professor Stephen Adolph. Physiological tests were later performed on the collected lizards at Harvey Mudd College.
Published:
I spent 5 weeks on a research vessel traversing 3000nm through the Central Pacific. We targeted mesoscale eddies, performing CTD casts, net trawls, and taking ADCP measurements.
Published:
Surveyed Blacktip Reef Shark populations and performed temperature transects along the sand flats at Palmyra Atoll with Dr. Barbara Block.
Published:
Spent two weeks with Dr. Chris Lowe and Dr. Mario Espinoza tagging nurse sharks, rays, and fishes in Santa Elena Bay.
Published:
Led a team of Stanford students in a collaboration with Universidad de Costa Rica to study sharks and rays using aerial imagery.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.