Publications
An updated list of all publications can be found on my Google Scholar profile.
Action-Free Reasoning for Policy Generalization Jaden Clark , Suvir Mirchandani, Dorsa Sadigh, Suneel Belkhale
CoRL 2025 TLDR: We propose a new way to train generalist robot polices from human video data via action reasoning.
Efficiently Generating Expressive Quadruped Behaviors via Language-Guided Preference Learning Jaden Clark , Joey Hejna, Dorsa Sadigh
ICRA 2025 TLDR: We introduce a novel approach that leverages priors generated by pre-trained LLMs alongside the precision of preference learning to generate robot behaviors that closely align with human expectations.
Zero-shot Shark Tracking and Biometrics from Aerial Imagery Chinmay Lalgudi, Mark Leone Jaden Clark , Sergio Madrigal-Mora, Mario Espinoza
Methods in Ecology and Evolution TLDR: We demonstrate the pre-trained models can effectively track arbitrary shark species in various environments and be used to extract key biometrics.
Deep Learning for Automated Shark Detection and Biometrics Without Keypoints Jaden Clark *, Chinmay Lalgudi*, Mark Leone*, Sergio Madrigal-Mora, Mario Espinoza
ECCV Computer Vision for Ecology 2024 TLDR: We show a simple method for computing shark biometrics using obejct detection and segmentation.
Efficient Exploration for Embodied Question Answering Allen Ren Jaden Clark , Anushri Dixit, Masha Itkina, Anirudha Majumdar, Dorsa Sadigh
RSS 2024 TLDR: We combine VLM semantic reasoning and rigorous uncertainty quantification to enable agents to efficiently explore relevant regions of unknown 3D environments, and stop to answer questions about them with calibrated confidence.
Online Path Repair: Adapting to Robot Failures in Multi-Robot Aerial Surveys Jaden Clark , Kunal Shah, Mac Schwager
Robotics and Automation Letters, IROS 2024 TLDR: We propose a novel method to efficiently replan multi-robot aerial surveys online.
Learned Objectives for Game Theoretic Planning Keiko Nagami* Jaden Clark *, Mac Schwager
IROS 2023: 1st Workshop on Multi-Agent Dynamic Games TLDR: We show that using learned trajectory predictors as objectives decreases planning horizon and improves performance of game-theoretic planners.
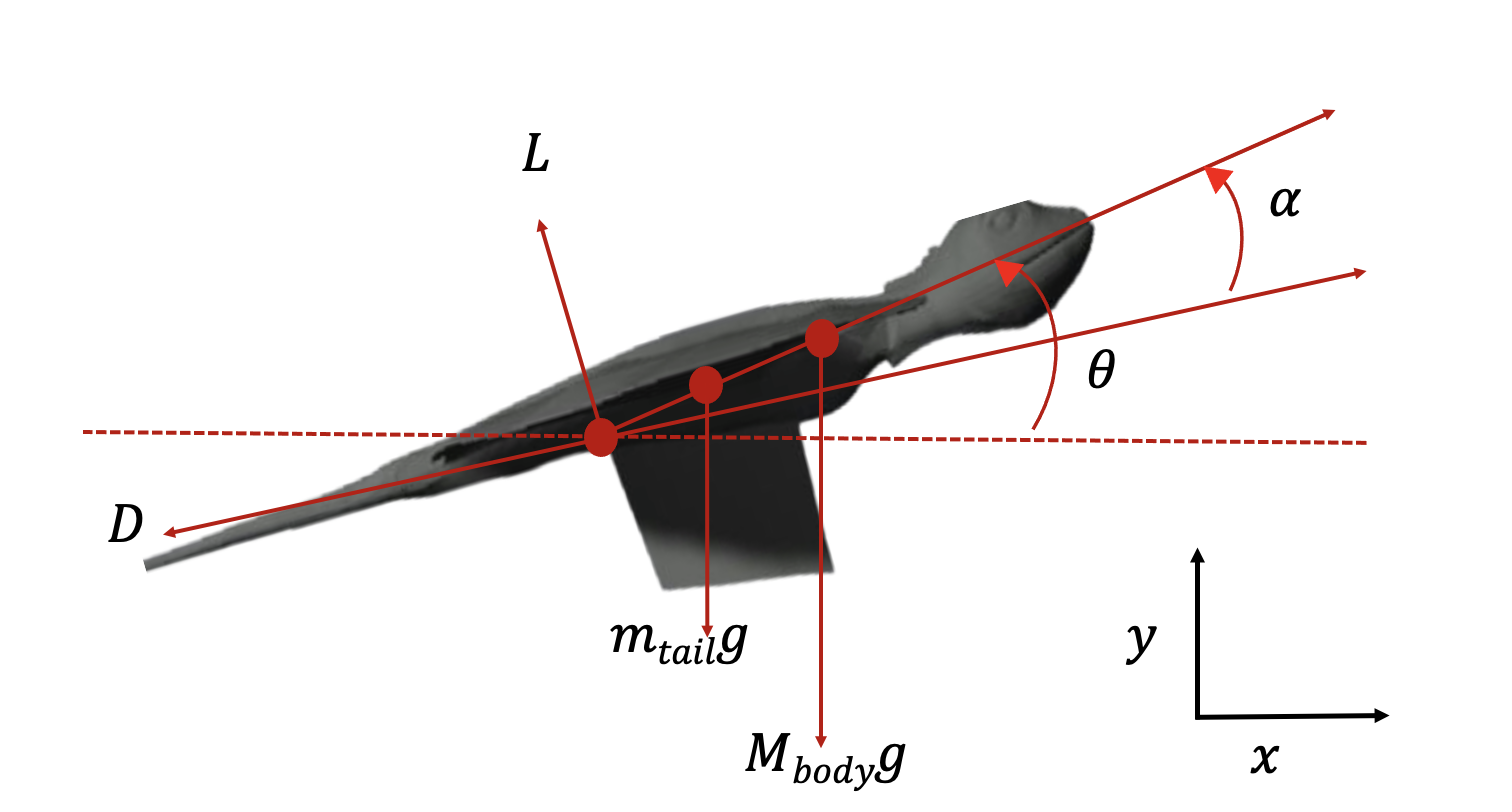
Tail Control Enhances Gliding in Arboreal Lizards: An Integrative Study Using a 3D Geometric Model and Numerical Simulation Jaden Clark , Christopher Clark, Timothy Higham
Integrative and Comparative Biology TLDR: We propose a novel numerical simulation to study gliding flight and show that tail control plays a significant role in Draco flight control.