Characterizing Key White Shark Habitat
Worked with researchers at the Stanford Hopkins Marine Station to analyze novel white shark Pop-up Satellite Tag (PSAT) data tracking and performed in-situ sampling of oceanography in the region. Our results suggest that the core of anticyclonic eddies, peripheries of cyclonic eddies, and seamounts are structuring vibrant mesopelagic communities in the area, attracting white sharks in a similar way to the well-known White Shark Cafe. 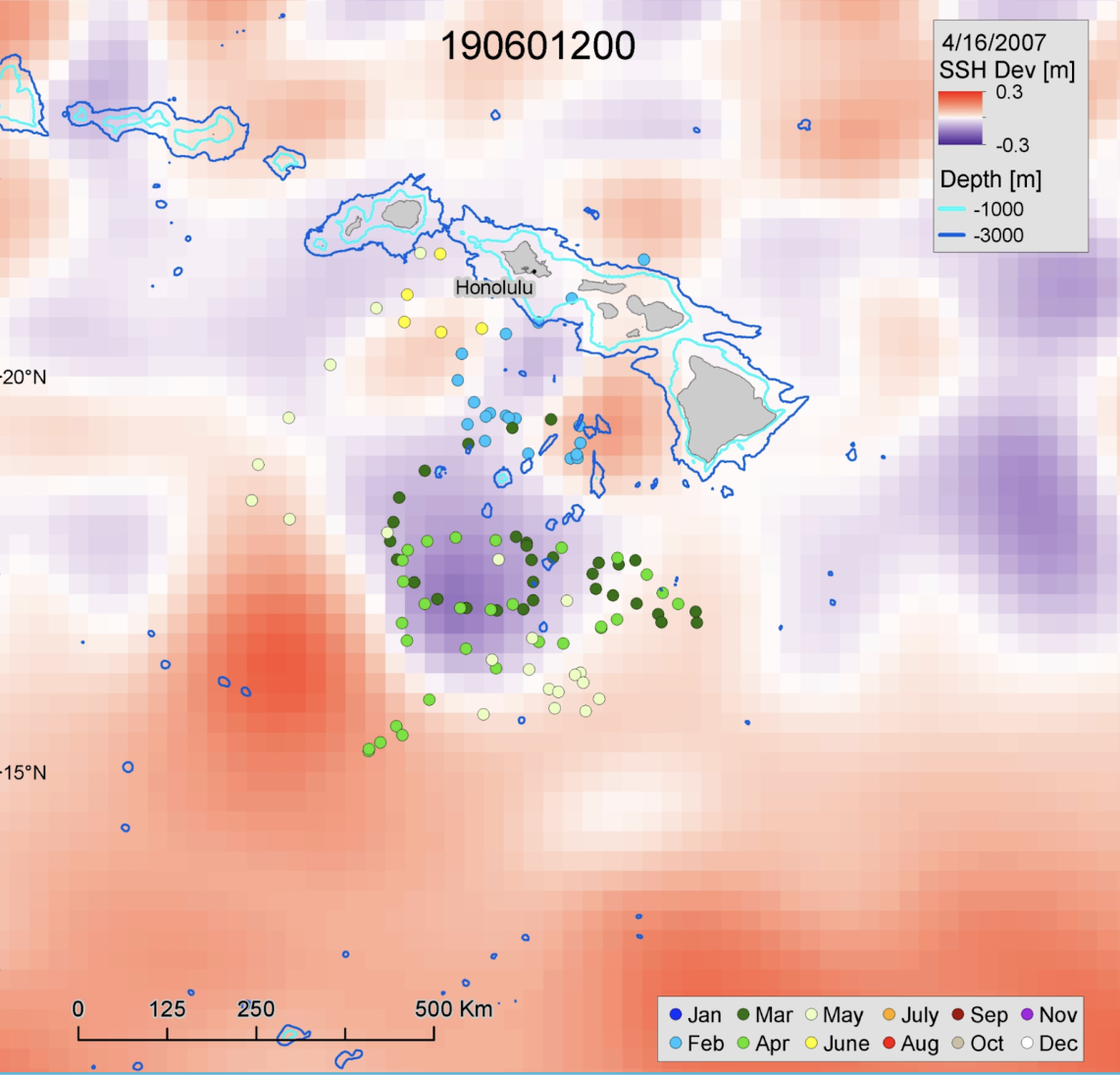


 At
At